# 概述
Octopus仿真服务提供在线仿真和批量仿真功能,支持您在云上以类似操作远程桌面方式操作图形化界面的仿真软件,支持基于OpenSCENARIO等标准格式的仿真场景管理,支持泛化大量仿真场景,支持规控算法工程管理,支持多场景并行高速运行和仿真报告查看。Octopus自研场景标签分类体系,多维度多层次科学分类场景。批量仿真服务支持将多个仿真场景分发到多个云节点,便于您快速获取仿真结果。您可以通过仿真服务提供的仿真软件完成在线仿真,泛化仿真场景、创建仿真评测任务等。仿真服务开发流程如下。
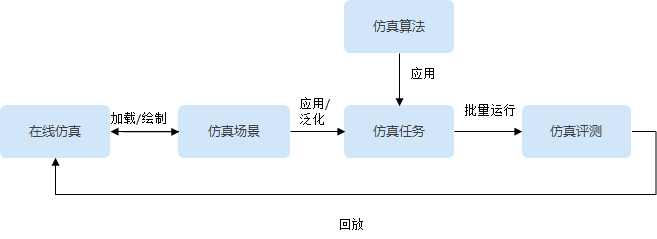
仿真服务操作引导如下:
在线仿真:利用分配到的仿真节点,在在线仿真机器VTD上进行仿真场景的绘制、加载、保存等操作,进行仿真开发;在分配到的自动驾驶开源仿真机器Carla进行仿真开发。
仿真算法:从用户Git仓库中导入Git算法,或上传可执行文件类型仿真算法。
仿真场景:创建仿真场景和仿真场景组用于仿真开发。
场景泛化:泛化大量仿真场景,扩充仿真场景库。
任务管理:选择仿真算法和仿真场景创建仿真任务,从行车安全、驾驶行为、乘员舒适性等角度衡量仿真算法控制效果,支持可视化仿真结果,生成任务报告。
# 回放式仿真
Octopus自研的回放式仿真(replay & simulation,简称resim,以下统一使用resim)是基于真实路测场景仿真。即您可以将录制的路测场景以rosbag形式上传到仿真服务“场景管理”模块中保存。同时您可以对接自定义自动驾驶算法,基于真实路测场景评测算法控制效果。加快自动驾驶落地。resim开发流程如下。

新建ROSBAG类型场景:上传ROSBAG类型真实路测场景文件;
新建自定义算法:真实道路复杂多变,因此算法处理逻辑需要针对rosbag路测场景数据,同时将待评测数据转换为pb文件,以符合protobuf message;
创建resim评测任务:基于新建的ROSBAG类型场景和算法,创建ROSBAG类型的resim评测任务进行评测;
查看resim仿真评测结果:查看resim评测结果。