# 创建仿真任务
仿真任务主要由仿真算法和仿真场景两部分组成,仿真算法提供自动驾驶控制算法,仿真场景作为自动驾驶模拟场景,测试仿真算法的控制效果。仿真算法来自于仿真算法模块中的算法,有内置和自定义两种;仿真场景为仿真场景服务中的场景或场景组。
# 创建任务
创建仿真任务时需要完成任务配置以及选择仿真场景两部分的内容。创建任务的步骤可参考如下:
单击“仿真服务>任务管理>创建任务”。
参考下表配置仿真任务基本信息。
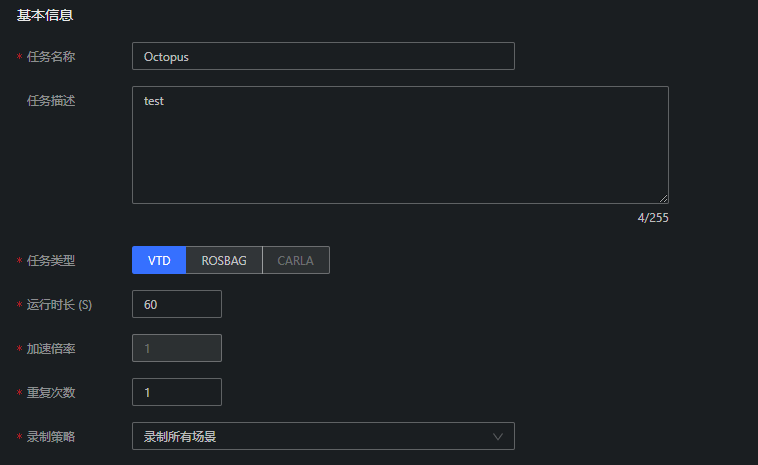
表 1 仿真任务基础信息说明(含*为必填项)
用vtd内置的recording工具录制仿真任务中的仿真场景,可通过回放直观查看主车在仿真场景中的运行情况。目前支持录制:所有场景、运行失败场景。
自定义配置
仿真任务支持您使用VTD内置算法、默认配置,和Octopus平台评测体系创建仿真任务。您也可选择自研控制算法以及自定义配置,并根据业务所需,配置评测项,开展仿真评测。格式为ROSBAG类型时,暂不支持使用配置功能。
选择仿真算法
若使用内置算法,需打开内置算法开关;若使用自定义算法,则需关闭内置算法开关,选择在“仿真算法”服务中创建成功的仿真算法以及版本,自定义仿真算法创建请参考新建算法。

 注意:
格式为ROSBAG类型时,仅支持选择与ROSBAG包相关的自定义算法。相关说明请参考对接resim的自定义算法。
注意:
格式为ROSBAG类型时,仅支持选择与ROSBAG包相关的自定义算法。相关说明请参考对接resim的自定义算法。选择配置文件
若使用内置配置,需打开内置配置开关;若使用自定义配置,则需关闭内置配置开关,自定义上传传感器的配置文件。
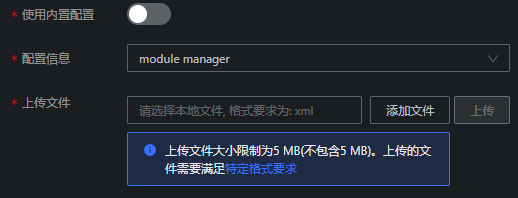
选择配置信息为“module manager”,文件类型为“.xml”,一般会包含传感器等相关配置参数;文件大小小于5MB。
选择评测项
Octopus支持配置自定义评测指标。您可以根据业务需要配置重点关注的评测指标,并自定义配置指标的阈值和权重系数。“评测通过分数”项表示评测场景运行是否通过的最低分数,为0-100之间的数值。您可以选择自由配置评测指标,自定义开展评测;也可以保持默认使用Octopus内置评测体系开展评测。
 注意:
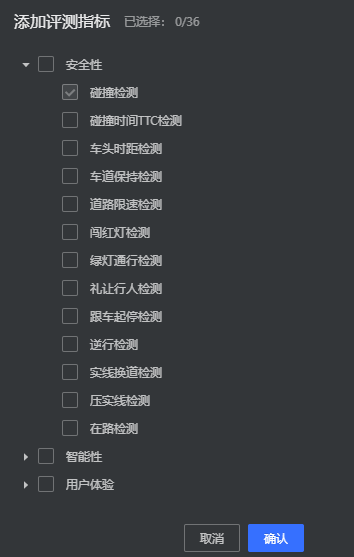
注意:- 碰撞检测指标为默认指标,不允许删除;
- 评测指标的阈值,支持自定义修改,非必填,若不填写,默认使用Octopus评测体系设值;一般数值类型的阈值可选范围为0-3600,角度类型的阈值为0-6.28;
- 所有评测指标权重之和为100%。
Octopus仿真评测从行驶安全性、智能性以及用户体验三方面提供多评测指标,您可以从中选择不超过36个评测指标开展评测。
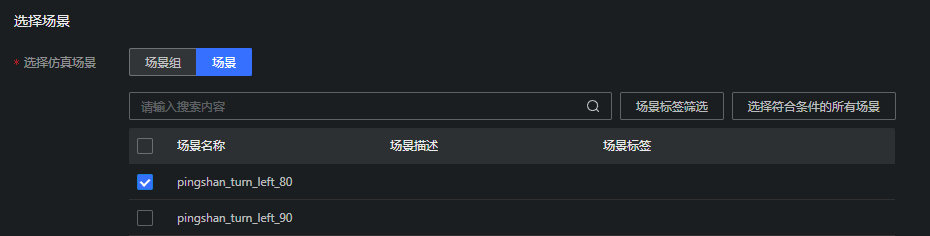
选择仿真场景或仿真场景组
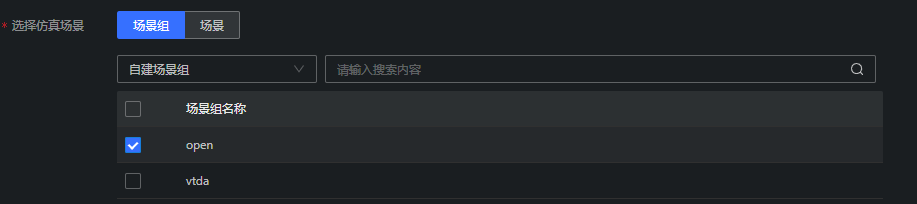
场景组:选中需要添加的场景组。若场景组数量过多,也可筛选场景组所属类别,并在搜索框内输入搜索内容,进行筛选;
场景:单击“场景”,在选择场景页面中选择需要添加的场景。若场景数量过多,可根据场景标签筛选,一键选择符合条件的所有场景;也可输入搜索内容精确查找指定场景。
单击“创建”,在任务管理页面出现您创建的任务信息,表示您成功创建任务。
启动任务
任务处于“就绪”状态,可单击任务名称后“操作”栏内的“启动”,启动任务。
查看任务详情
任务详情页展示任务的启动时间、运行时长、任务当前状态等信息。

查看任务进度
将鼠标移动至进度条处,显示当前任务所包含场景中成功/失败/总场景数量。

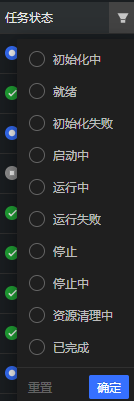
查看任务状态
可结合任务所使用的算法筛选任务,根据任务状态筛选任务。
 注意:
注意:- 用户生成的PB文件无法被平台的评测正确处理,就会出现PB异常状态;
- pb文件的path不固定,会使得任务一直处于运行中。
查询任务
在搜索框内输入搜索内容,精确查找制定任务。
下载PDF
单击任务名称后“操作>更多>下载PDF”,将任务报告下载至本地查看。