# 场景标签管理
Octopus平台自研场景分类标签体系,提供ODD筛选、sotif风险、碰撞风险以及测试功能4个维度对场景及场景组分类,同时还支持您根据业务所需创建自定义标签,从其他维度分类场景,更高效管理场景库。在创建仿真评测任务时,基于分类标签体系,可快速筛选出符合评测任务需求的场景。
- ODD筛选:每个自动驾驶系统运行的前提条件和适用范围可能不同,因此在进行场景测试时,对应的场景是属于自动驾驶系统设计运行域内至关重要。ODD(operational design domain,设计运行域)筛选提供按设计运行条件进行场景删选的功能,ODD筛选类别的建立参考NHTSA(美国国家公路交通安全管理局)发布的《A Framework for Automated Driving System Testable Cases and Scenarios》文献和德国Pegasus项目的场景分类体系,从道路、交通条件、环境条件等层次描述场景;
- 测试功能:自动驾驶的开发是按照各个功能模块进行的,如跟车、换道、车道保持等功能,测试功能分类从功能场景的角度出发,提供特定功能模块的针对性测试;
- sotif风险:预期功能安全(sotif)关注的是由功能不足、或者由可合理预见的人员误用所导致的危害和风险,sotif测试时会事先进行风险分析,针对每个风险进行可接受性分析和场景测试,参考ISO21448方法论,利用STPA方法和NHTSA的研究成果《Safety of the Intended Functionality of Lane-Centering and Lane-Changing Maneuvers of a Generic Level 3 Highway Chauffeur System》,提供了内置的sotif整车风险数据库,如非预期侧向运动、非预期横摆等风险,通过选择测试对应的sotif风险,进一步判断自动驾驶算法在对应的sotif风险危害是否可以接受;
- 碰撞风险:自动驾驶车辆在行驶过程中应该要保证安全性,具体包括保证制动和侧倾的稳定性、与他车的安全距离、遵守交通规则、最优驾驶实践等安全需求,但上述需求不是在任何时刻都必须严格遵守的,这个应该跟具体的驾驶场景强相关,尤其是跟场景的风险程度相关。根据加拿大滑铁卢大学的研究成果《on road safety of automated driving system taxonomy and safety analysis methods》,将场景按碰撞风险程度分为正常驾驶、接近碰撞、碰撞、动态驾驶任务支援四个层级,对于不同碰撞风险等级的场景,对自动驾驶的行为表现要求有所不同。如在对于正常驾驶的场景中,自动驾驶系统应该要尽量满足以上所有安全需求,从而减少碰撞风险在不同的场景按场景的危险程度分类场景,但对于接近碰撞的场景,此时“与他车的安全距离”需求已经被违反了,自动驾驶系统的目标是降低碰撞风险,因此“交通规则”也可能被违反,可以降低评价权重。
# 新建标签
您可根据业务所需扩展标签体系,创建自定义标签,对场景分类。可在创建场景时同步新建场景标签,操作步骤同下所述。场景创建成功后新建标签同步创建完毕;也可在“标签管理”页面创建标签。
单击“仿真服务>仿真场景>场景>场景标签管理>新建标签”。
选择标签分类,输入标签名称。
 说明:
说明:- 标签名称包含中英文、数字、“_”“-”,不得超过64个字符;
- 创建sotif类别的场景标签,还需填写风险描述,不超过50个字符;
- 一次性批量添加标签个数不超过20个。
# 查询标签
基于标签的场景查询步骤如下:
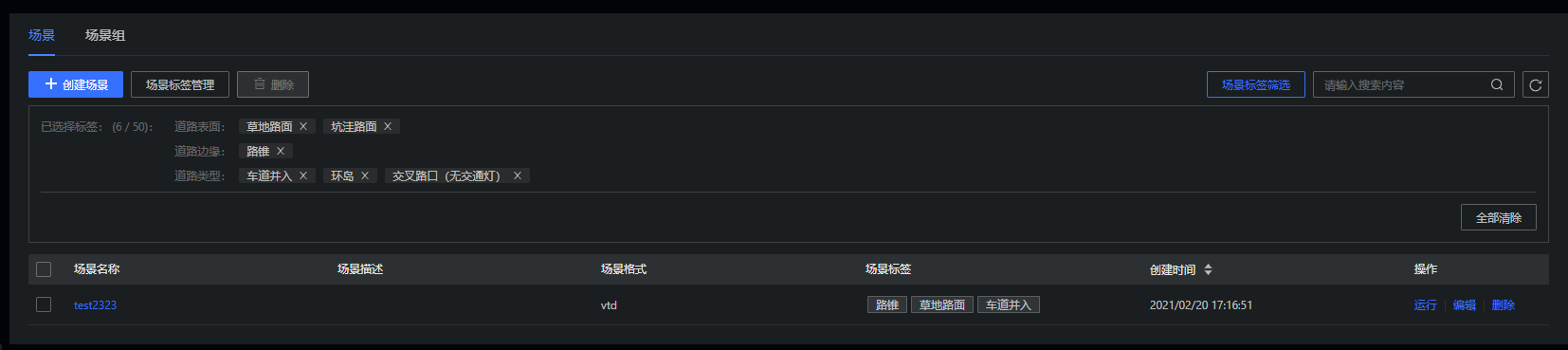
单击“仿真场景>场景>场景标签筛选”。
勾选所需标签。
 注意:
同类别标签选中取场景并集,不同类别标签选中取场景交集。
注意:
同类别标签选中取场景并集,不同类别标签选中取场景交集。在场景名称列表页页筛选出包含已选标签的场景信息,如下图所示。
# 修改场景标签
标签管理模块支持您对创建的场景标签进行修改、删除操作。
单击“仿真服务>仿真场景>场景>场景标签管理”。
修改标签
单击标签名后“操作”一栏内的“编辑”,修改标签名称。标签所属类别不允许修改。
查询标签
在搜索框内输入搜索内容,点击查询。
删除标签
单击标签名后“操作”一栏内的“删除”,删除标签。删除后不可恢复,请谨慎操作。
 说明:
说明:- 平台预置场景标签暂不支持删除;
- 标签绑定场景后暂不支持删除。