# 仿真场景管理
仿真场景模块支持对单个仿真场景的增删改查操作。您可根据场景类型,依据平台提示,本地上传符合要求的场景文件。场景创建完毕后,您可选择在线VTD机器进行回放,通过VTD 内置算法检验场景质量。
# 添加场景
仿真场景支持您上传符合VTD场景规范的自定义场景,以及基于真实场景录制的ROSBAG类型场景。添加场景的步骤可参考如下:
单击“仿真服务>仿真场景>场景>创建场景”。
填写基本信息
填写场景的名称,从下拉列表中选择场景格式,填写场景的描述,选择场景标签。

- 名称:包含中英文、数字、“_”“-”“.”,不得超过64个字符;
- 场景格式:当前支持VTD、OPENSCENARIO和ROSBAG;
- 描述:简要描述场景,不包含“@#$%^&*<>\”,不超过255个字符;
- 场景标签:同一类别标签只可单选,不同类别场景标签支持多选。标签数量不超过50个。可新建标签,操作请参考新建标签。
上传文件
上传文件根据选择场景类型不同,暂有VTD、OPENSCENARIO以及ROSBAG类型文件。
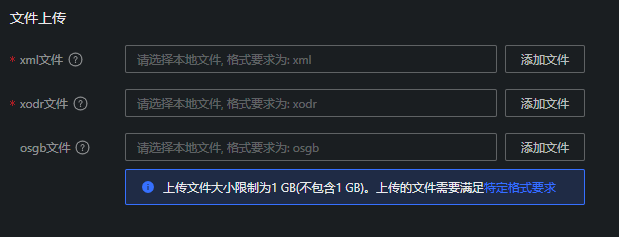
VTD类型文件:上传的场景不可缺少必要的场景文件,需包含:
开放格式和实际上的公路网络在驾驶模拟应用程序中的描述标准(文件格式为“.xodr”);
VTD内置场景文件(文件格式为“.xml”);
 注意:
由于VTD的不同版本之间存在主车id不固定的问题,为了保证规控算法和评测算法能正确判断找到主车,绘制的场景文件的主车名称(name)字段应该为Ego。暂不支持自定义。
注意:
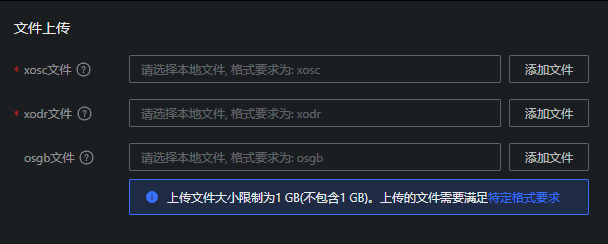
由于VTD的不同版本之间存在主车id不固定的问题,为了保证规控算法和评测算法能正确判断找到主车,绘制的场景文件的主车名称(name)字段应该为Ego。暂不支持自定义。OPENSCENARIO文件:动态场景描绘文件。上传场景文件需包含以下类型。
- 开放格式和实际上的公路网络在驾驶模拟应用程序中的描述标准(文件格式为“.xodr”);
- OpenScenraio动态场景描绘文件(文件格式为“.xosc”);
 注意:
由于VTD的不同版本之间存在主车id不固定的问题,为了保证规控算法和评测算法能正确判断找到主车,绘制的场景文件的主车名称(name)字段应该为Ego。暂不支持自定义。
注意:
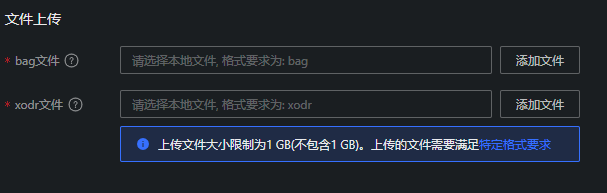
由于VTD的不同版本之间存在主车id不固定的问题,为了保证规控算法和评测算法能正确判断找到主车,绘制的场景文件的主车名称(name)字段应该为Ego。暂不支持自定义。ROSBAG文件:基于真实道路场景仿真场景类型。上传场景文件需包含以下类型。
开放格式和实际上的公路网络在驾驶模拟应用程序中的描述标准(文件格式为“.xodr”);
包含真实路测道路场景文件(文件格式为“.bag”)。
单击“创建”,页面提示创建成功,并在场景管理页面看到您新建的场景信息。
查看仿真场景
单击场景名称查看该场景详细信息。
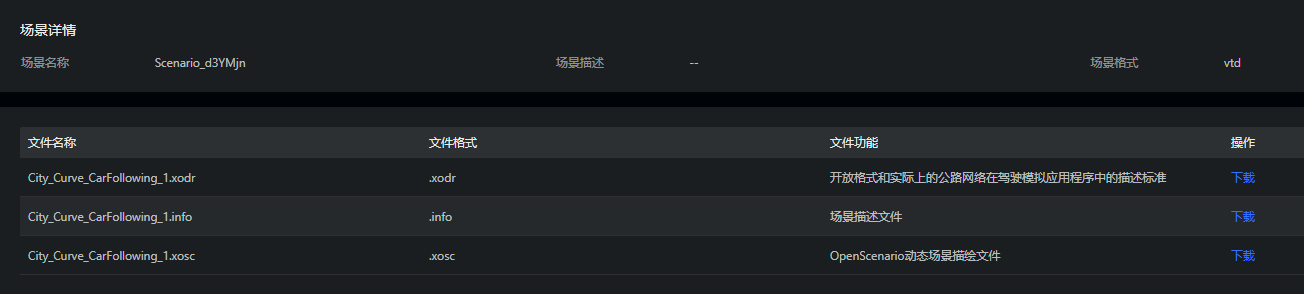
场景详情:场景名称、场景格式等信息;
文件名称:该场景包含的所有场景文件信息。其中OpenScenraio动态场景描绘文件(文件格式为“.xosc”)或VTD内置场景文件(文件格式为“.xml”)两者必须包含其中一种。开放格式和实际上的公路网络在驾驶模拟应用程序中的描述标准(文件格式为“.xodr”)必须包含;
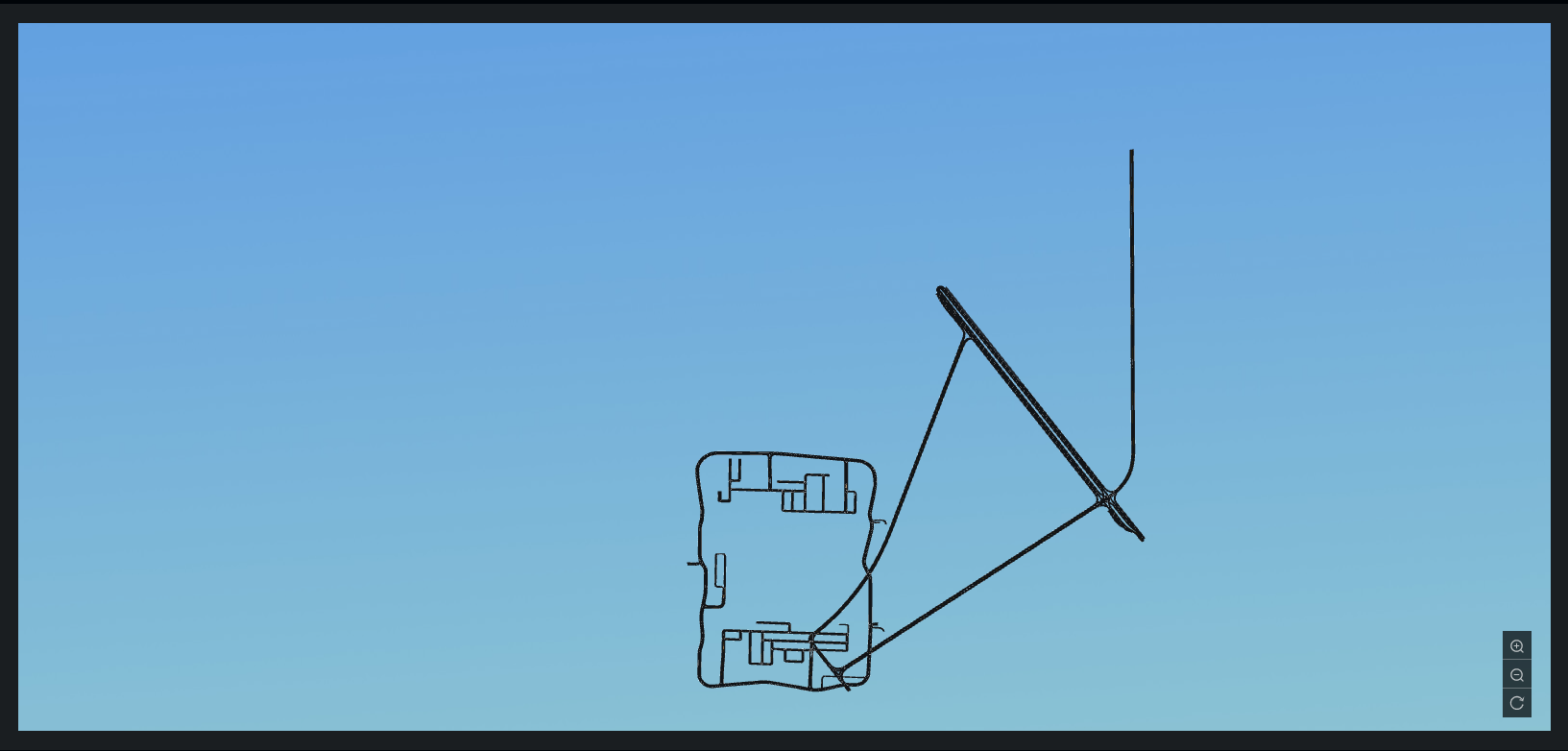
场景预览:预览场景地图。单击右下方的放大、缩小以及旋转按钮,可放大、缩小以及旋转地图,鼠标上下滚动,也可以放大缩小图片,鼠标拖动图片可以旋转图片。
下载场景
单击文件名称后“操作”一栏内的“下载”,将场景文件下载至本地。
替换文件
单击文件名称后“操作”一栏内的“替换文件”,替换为本地相同格式的场景文件。
# 运行场景
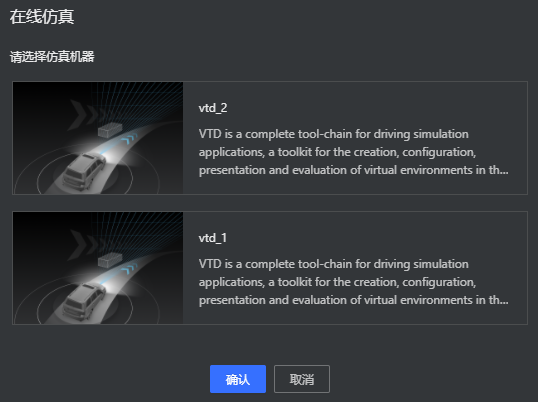
仿真场景创建完毕后,您可直接在VTD机器上运行,查看场景运行效果。单击场景名称后“操作”一栏内的“运行”,您可选择一台分配给当前账号的VTD机器,使用VTD内置算法运行仿真场景。
说明: ROSBAG类型场景暂不支持运行场景功能。
# 查询场景
在搜索框中输入搜索内容对场景进行查询。若场景较多,您也可根据场景标签进行过滤,查找场景。
# 修改场景信息
对于自定义场景,您可以单击场景名称后“操作”一栏下的“编辑”,修改场景信息。
# 删除场景
对于自定义场景,您可以单击场景名称后“操作”一栏下的“删除”,删除该场景。勾选多个场景前勾选框,单击“删除”,批量删除多个场景。
- 删除后该场景将不再应用于仿真场景库和仿真场景组中,请谨慎操作;
- 绑定仿真任务的仿真场景不允许删除,否则会导致仿真任务运行失败。删除场景需先删除与之相关的仿真任务;
- 系统内置场景不允许删除。