# VTD在线仿真
VTD软件由德国VIRES公司开发,针对车辆动力学仿真软件中存在的道路模型简单、交通和交通规则仿真不足、环境模型和驾驶员模型简单的不足,提供了更加完善的仿真环境。VTD软件可结合VTD集成的车辆动力学仿真软件模块进行复杂交通环境的开发,具体功能请参考下表。
表 1 VTD与VTD集成的软件模块联合仿真的工作模式
VTD软件在Octopus进行了部署集成。

Octopus支持您在在线仿真页面加载场景库中的场景,也支持您在VTD软件所集成的ScenarioEditor编辑器中,新建自定义场景或者编辑已下载的场景,并通过Octopus在线仿真提供的“保存场景”按钮保存到Octopus仿真场景库中。场景的来源可以是VTD中内置的场景库资源,也可以是您在Octopus仿真场景库中添加的符合VTD场景规范的自定义场景。
# 分配VTD资源
Octopus平台在线仿真模块提供了多台VTD资源(以三台为例)。平台管理员可以根据任务需求,在“配置管理”中将指定仿真节点按照权限配额分配给特定的租户管理员,具体操作方法请参见“配额管理”。被分配到VTD资源的租户管理员,可以在在线仿真模块访问分配给自己的所有VTD机器。VTD资源不允许重复分配,即同一台VTD只能分配给唯一的租户管理员,分配完成后不能再分给其他的租户管理员。租户管理员与其管理的用户共享分配到的VTD资源,在使用时会出现机器抢占的情况,即后登录的用户可以抢占使用该仿真节点。
可以通过下图所示状态灯判断当前VTD机器是空闲(绿灯)还是使用中(红灯),合理安排时间,分段使用。
# 加载场景
Octopus平台支持您在VTD中加载场景库中的场景,在线编辑、运行并回放。由于VTD的不同版本之间存在主车id不固定的问题,为了保证规控算法和评测算法能正确判断找到主车,绘制的场景文件的主车名称(name)字段应该为Ego。ROSBAG类型场景暂不支持在线仿真功能。
单击页面右上方的“加载场景”。
选择加载场景方式
选择您想要添加的场景;
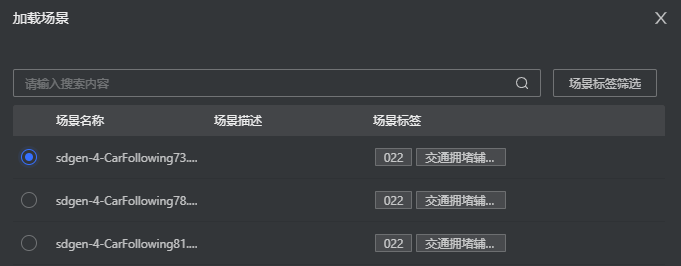
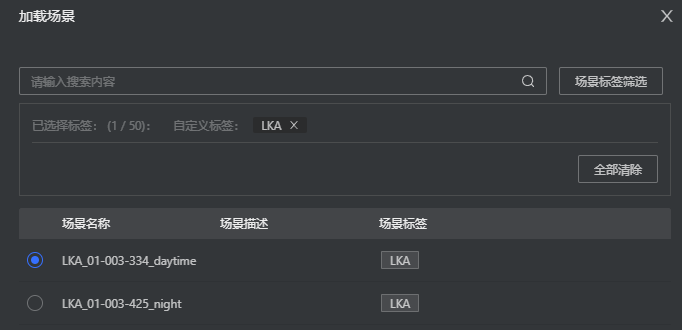
若场景数量多,您也可以根据场景的标签进行过滤,并选择需要加载的场景;
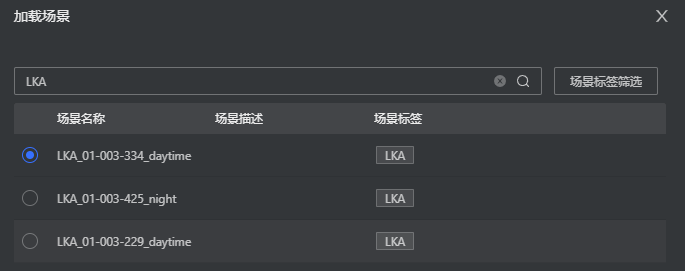
在搜索框中输入搜索内容,单击搜索,并在筛选出的场景列表中勾选中需要加载的场景,如图所示。
选择仿真算法
目前默认使用VTD内置算法。
单击“确认”。仿真场景加载成功。
查看加载场景过程文件
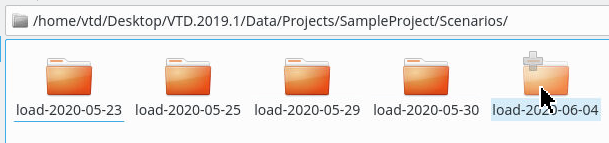
使用VTD仿真在线加载场景后,会在“/home/vtd/VTD.2019.1/Data/Projects/SampleProject/Scenarios/”目录下出现加载过的场景文件,打开指定日期的场景文件夹。
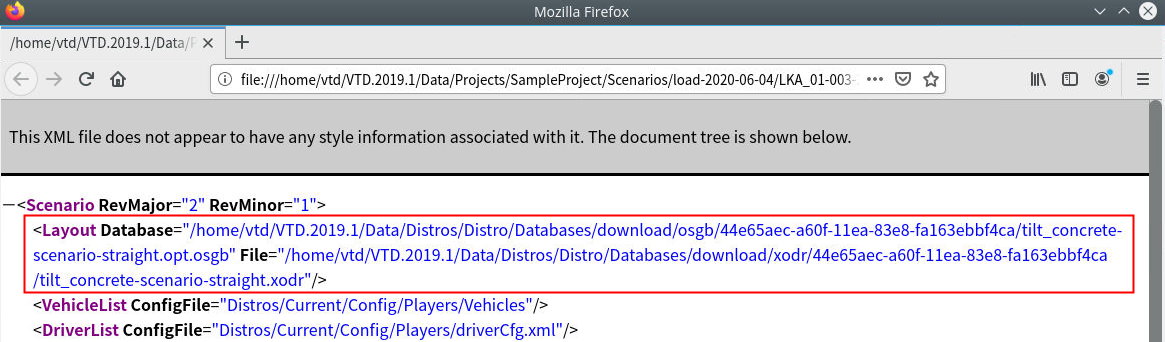
单击打开该场景文件夹下的“.xml”文件,即可查看下载下来的“osgb”以及“xodr”文件所在路径。
查看加载算法过程文件
当您加载指定场景,并加载自定义算法后,在“/home/vtd/tmp/”目录下会存储PID和算法加载的缓存文件。
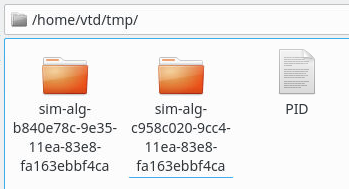
- **PID:**即加载算法的唯一进程标识符,该文件请勿删除;
- **算法缓存:**加载的算法缓存存储在“sim-alg-*”文件夹中,可以根据实际需要手动清理,释放空间。
# 保存场景
Octopus平台支持您在VTD软件上利用 ScrnaioEditor 和 RoadDesigner模块,共同完成对道路交通场景、车辆传感器等自定义设计,并保存在场景库中,操作步骤如下。
选取场景保存路径
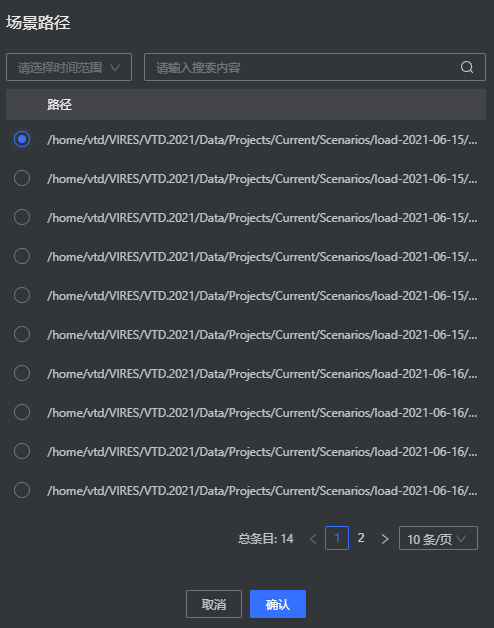
单击页面右上方的“保存场景”,可以根据场景路径关键字检索,或根据时间周期(最多半年以内)筛选最近加载或修改过的文件列表, 选取场景保存的具体路径。
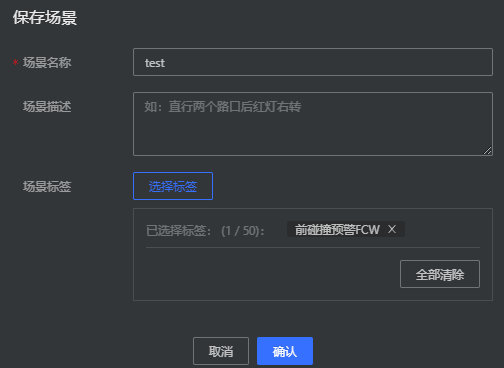
填写场景基本信息
填写场景的名称、描述信息,并选取场景标签。
- 名称:包含中英文、数字、“_”“-”,不得超过64个字符;
- 描述:不得包含“@#¥%……&*<>\”字符,不得超过255个字符;
- 场景标签:选择符合场景的场景标签标记场景,场景标签数量不超过50个。
单击创建,页面右上方提示“保存场景成功”,表示您的场景已经保存成功。