# 创建仿真评测任务
本节提供一份acc算法样例,您可以访问acc算法样例 (opens new window)获取样例,并参照以下步骤完成从创建仿真算法,创建仿真场景到创建仿真评测任务的完整仿真服务开发流程。
# 步骤一:创建仿真算法
Octopus仿真服务提供两种算法创建方式,可上传可执行文件类型算法,也可创建Git类型算法,即从自有Git仓库中拉取算法,展开评测。本节以Git类型算法为例,为您介绍从创建算法至从Git仓库中获取权限读取算法的完整流程。
单击“仿真服务>仿真算法>新建算法”;
填写算法基本信息
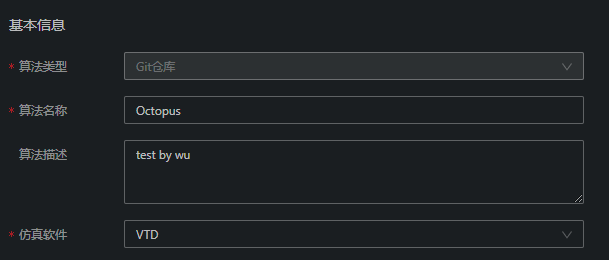
- 算法类型:Git仓库和可执行文件两种。本节以Git仓库为例;
- 算法名称:包含中英文、数字、“_”“-”,不得超过64个字符;
- 算法描述:不得包含“@#¥%……&*<>\”特殊字符,不得超过255个字符;
- 仿真软件:VTD和ROSBAG类型。本节以VTD为例。
配置Git仓库

Git地址:配置您的算法项目的Git仓库地址,Octopus平台将从该地址克隆(clone)您的算法项目,当前仅支持SSH方式克隆项目,不支持HTTPS方式。以GitLab平台为例,可以参考格式如下:
ssh://git@gitlab.com:项目名称/xxx/xxx.git //GitLab项目地址格式示例,在您Git项目的“clone”选项下可以直接复制项目地址Git分支:配置您的算法项目分支。例如一般项目主版本是master,请按项目实际情况填写;
工作目录:算法编译和运行的当前目录,缺省值“/srv/code”。
配置编译环境
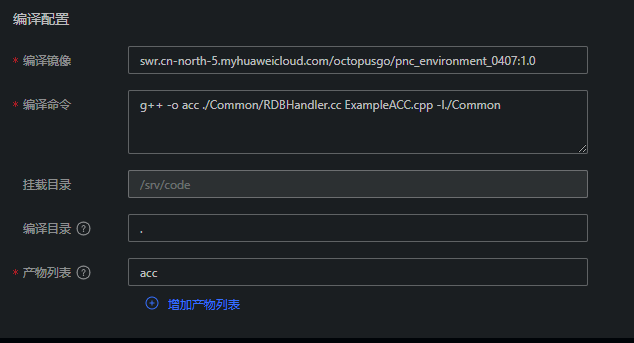
表 1 编译参数信息
镜像中包含算法编译所需的所有环境条件,Octopus平台将拉取指定镜像。
 说明:
编译产物,在Octopus仿真系统中简称产物,指的是项目编译后生成的可执行文件、静态或动态链接库,及其开发、编译、运行时所依赖的其他文件,所打包而成的“tar.gz”文件。在系统使用时,会把它解压到镜像的指定目录下。
说明:
编译产物,在Octopus仿真系统中简称产物,指的是项目编译后生成的可执行文件、静态或动态链接库,及其开发、编译、运行时所依赖的其他文件,所打包而成的“tar.gz”文件。在系统使用时,会把它解压到镜像的指定目录下。配置运行信息
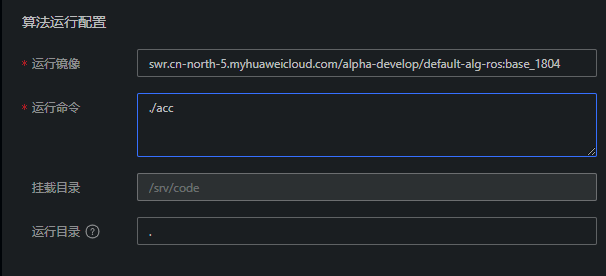
表 2 运行参数信息
镜像中包含算法编译所需的所有环境条件,Octopus平台将拉取指定镜像。
运行算法所需命令,一般为算法编译后产生的可执行文件,也支持手动上传。例如,若编译生成的产物为可执行文件“test.sh”,则执行“test.sh”命令启动运行脚本。
单击“创建”,新建算法项目。
检查镜像状态
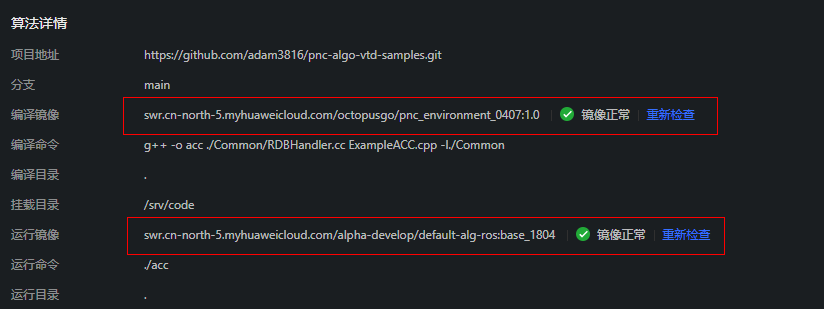
- 若镜像地址有效,状态为“镜像正常”;
- 若镜像地址无效,状态为“拉取失败”;
配置部署密钥(Deploy Key)
新建Git算法项目后,平台将自动生成一对SSH密钥,私钥平台将自动保存,公钥即部署密钥,需要您手动配置到Git项目中,以允许Octopus平台和您的Git项目建立安全连接,授予平台读取您项目代码的权限。单击“
 ”复制公钥信息到剪贴板,配置公钥到Git项目的具体配置方法请参考“SSH部署密钥配置方法”。
”复制公钥信息到剪贴板,配置公钥到Git项目的具体配置方法请参考“SSH部署密钥配置方法”。
编译算法
单击算法名称后“编译”,算法开始编译,需等待一段时间。

仿真算法创建完毕。更多详细内容请参考新建算法。
# 步骤二:创建仿真场景
您可通过泛化大量场景,评测仿真算法对场景的控制效果,也可以上传场景文件创建自定义场景,开展仿真评测任务。本节以创建泛化场景为例。创建自定义仿真场景请参考新建仿真场景。
单击“仿真服务>场景泛化>创建场景泛化”;
填写泛化基本信息
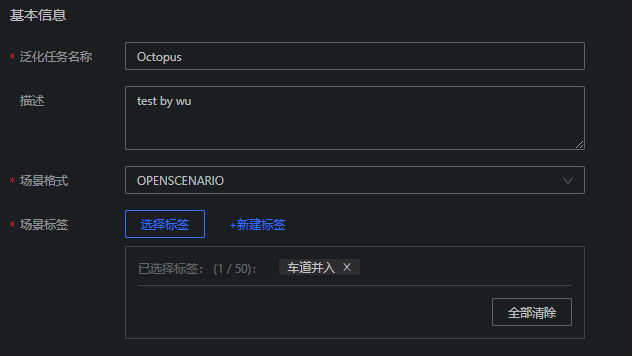
表 3 泛化参数信息
场景标签便于区分不同的泛化任务。支持创建自定义标签。标签数量不得超过50个。详细介绍请参考场景标签管理。
配置泛化参数
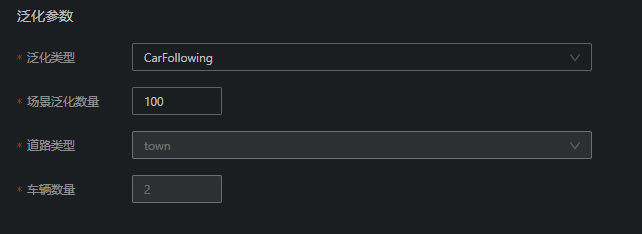
表 4 泛化参数信息
- CarFollowing:跟车-单车道跟驰
- LaneChangeBarrier:换道-障碍物识别避让
- LaneChangeCross:换道-路口换道
- LaneChangeDecreased:换道-前方车道合并
单击“创建”,泛化场景创建完毕。更多泛化场景内容请参考场景泛化。
泛化任务完成后,单击泛化任务名称,查看泛化场景名称。

# 步骤三:创建评测任务
算法和仿真场景创建完毕后,您可以创建仿真评测任务,配置自定义评测指标,评测仿真算法的质量。本节以使用内置评测指标为例,创建VTD 格式的仿真评测任务,对之前创建的仿真算法展开评测。
单击“仿真服务>任务管理>创建任务”;
填写基本信息
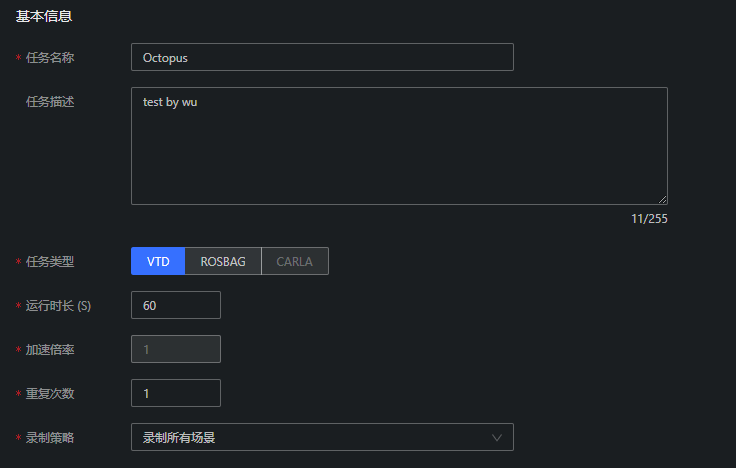
表 5 仿真任务基本信息
回放场景直观查看主车在仿真场景中的运行情况。VTD类型任务使用vtd内置的recording工具录制仿真任务中的仿真场景;ROSBAG类型任务通过数据回放模块回放场景。目前支持录制:所有场景、运行失败场景。
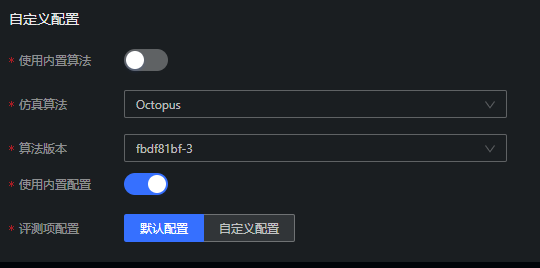
完成自定义配置
本节中使用先前创建成功的仿真算法,默认使用内置配置以及内置评测指标。
选择仿真场景或场景组

以上信息填写无误后,单击“创建”,仿真评测任务创建完成,任务处于“就绪”状态。
启动任务
单击评测任务名称后“ 操作”一栏内的“启动”,启动评测任务。
# 步骤四:查看仿真评测结果
评测任务结束后,可查看评测任务结果。有关评测任务的详细内容请阅读仿真任务报告一节。
单击仿真任务名称,进入该任务的详情页。
查看任务详情
任务详情包含任务名称、任务使用的仿真算法、任务类型等信息。

查看仿真场景的运行结果
仿真场景运行结束后,Octopus评测体系会通过一系列评测指标对场景运行情况进行判定,并计算场景最终得分。根据得分判断场景最终是否通过评测。

回放场景
任务已完成且创建任务时选择录制场景策略,则支持回放场景。VTD格式仿真场景在场景后单击“回放”,选择一台分配给当前账号且不处于“系统镜像备份中”、“系统镜像恢复中”的仿真机器进行回放。ROSBAG类型仿真在场景后单击回放,跳转至数据服务的数据回放模块进行回放,详情请参考数据回放;
下载算法日志
您可将仿真任务的日志下载至本地查看。日志采集由录制策略决定;
说明:
内置算法不支持日志下载。查看可视化结果
单击场景名称后“操作”一栏内的“可视化结果”,查看场景运行中关键指标的变化以及异常数据情况。可视化图表可辅助判断场景运行质量,检验仿真算法控制效果。有关可视化结果的详细介绍请阅读可视化结果。

下载任务报告
任务完成后,您可下载PDF格式的任务报告至本地,便于查看。单击任务名称后“操作”一栏内的“更多>下载PDF”即可。
有关仿真任务评测结果的详细内容请参考仿真任务报告一节。