# 导出数据集
成功创建或导入数据集后,您可以将所需数据集导出,保存到您账号下指定的OBS桶中。
# 前提条件
- 数据集处于“已完成”状态;
- 已经创建OBS桶,用于存储将要导出的数据集。
# 操作步骤
创建OBS桶
在将数据集导出前,需要在“OBS对象存储服务”中创建桶,用于存放导出的数据集,创建方法请参见“如何创建OBS桶?”。若您的账号下已经有OBS桶,并可用于存放数据,可跳过此步。
指定导出路径,填写访问密钥。
单击“数据集”,找到想要导出的数据集名称,单击操作栏的“导出”。
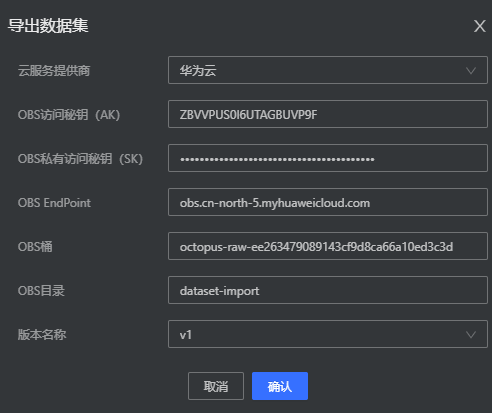
- 云服务提供商:目前支持华为云;
- 填写访问密钥:密钥(AK)和私有访问密钥(SK)需要至华为云个人账号中心获取,具体方法请参见“如何获取访问密钥AK/SK?”;
- OBS EndPoint:OBS地址。请输入华为云终端地址,不含http(s);
- 指定OBS桶:只能包含数字、小写英文、“-”、“.”,不能以特殊字符开头或两个特殊字符相连;
- OBS目录:数据集导出后存放的目录。不能包含“\\😗?\"<>|”以及两个以上相连的“\”;
- 版本名称:选取导出的数据集版本。
导出数据集
数据集信息填写完成后,单击“确认”,等待数据集下载,可以单击“导出任务”查看导出状态和历史记录。
查看导出的数据集
待导出数据集处于“创建成功”状态,在指定的OBS桶中(如“octopus-beijing1”)可以看到下载的数据集文件夹目录,将包含该数据集的全部文件。

导出的数据集文件目录结构可参考如下(包含图片标注):
. |--{数据集id}-{数据集名称}-{时间戳} |---版本-{版本名称} ├─ VOC #数据集的名称必须是VOC(如果使用Octopus内置算法的话必须,否则可自定义) ├─ JPEGImages #该数据集包含的JPEG格式的原始图片文件 ├─ Annotations #该数据集包含的标注文件(每个图片对应一个xml文件) ├─ SegmentationClass #该数据集包含的用于语义分割的图片和标注文件(每个图片对应一个xml文件) ├─ 000000008.jpg #图片 ├─ 000000008.xml #标注文件 ... ├─ ImageSets ├─ Main ├─ train.txt #图片文件名分隔符-训练 ├─ val.txt #图片文件名分隔符-验证 ├─ test.txt #图片文件名分隔符-测试 └─ Segmentation ├─ train.txt #图片文件名分隔符-训练(用于语义分割) ├─ val.txt #图片文件名分隔符-验证(用于语义分割) └─ test.txt #图片文件名分隔符-测试(用于语义分割) └─ classes.txt #标注类型(如果使用Octopus内置算法的话必须,否则可自定义) └─ mainifest.json # 数据记录文件(数据源)导出的数据集文件目录结构(点云标注类型):
. |--{数据集id}-{数据集名称}-{时间戳} |---版本-{版本名称} ├─ version-1 #数据集的名称:version-id-版本 ├─point_cloud #数据集包含的点云标注类型原始文件 ├─0 #点云标注某时间戳内采集点云图像原始文件(按采集时间顺序排列) ├─lidar_roof_0-1595228688501.pcd #雷达传感器在某时间戳内采集图像文件,名称:传感器名称_采集时间戳.pcd ├─1 ├─2 ├─label #标注信息文件 ├─0.json #某时间戳内标注信息文件,与点云传感器时间相同 ├─1.json #某时间戳内标注信息文件,与点云传感器中同名文件夹时间相同 ├─image #与点云图像对应的图片类型原始文件 ├─0 #摄像头在某时间戳内采集图像信息原始文件(与点云同名文件夹时间一致,可能有几毫秒延迟) ├─camera_encoded_0-1595228688502.jpg #摄像头在某时间戳内采集图片文件,与雷达传感器采集时间相同 ├─1