# 标定管理
标定管理用于管理用户上传的标定文件并解析其中的数据。标定数据记录车辆本身以及车辆上传感器的配置信息,一个标定项对应一个传感器标定文件。Octopus标定文件需满足一定标准,Octopus会对上传的每个标定文件名、格式和类型做检查。
# 上传标定项
编写标定文件
当前支持车架配置以及传感器标定信息配置:车架配置、相机以及激光雷达。
以创建激光雷达类型传感器标定文件为例详细说明,创建一个名为“pandar_40.yaml”的标定文件,文件格式可参考如下:
Pandar40: rotation_vel2veh_matrix: rows: 3 cols: 3 data: [0.999365,0.0349167,0.00707821,-0.034795,0.999256,-0.0166374,-0.00765387,0.0163806,0.999837] tanslation_vel2veh_vector: rows: 3 cols: 1 data: [0.00915069,1.34196,1.38] rotation_veh_vel_euler: yaw: -1.9940678960476272 pitch: 0.43853880056948835 roll: 0.9386082809708912 translation_veh_vel: x: 0.00915069 y: 1.34196 z: 1.38 timeshift_vel_veh: 0.000000000文件开头字段“pandar40”:为传感器命名,长度不可超过64个字符,命名格式可参考下表,并请结合实际情况自行定义。
表 1 标定文件命名参考
传感器的标定文件编写格式和配置项类似,可参考上述规范;车辆的标定文件配置项与传感器存在差异,主要差异配置项均是车辆自身的相关参数信息,参照示例模板,按照实际情况填写即可。
- 各类型标定文件模板可参考附录标定文件模板部分;
- 各类型标定文件示例请参考使用:calibration.rar。
单击“配置管理>标定管理>标定项列表>上传标定项”,新建一个标定项。
格式:当前支持标准“Octopus格式”;
上传标定文件:将车辆和传感器信息标定文件,根据提示,添加到对应标定类型。一次可以添加多个,标定文件不得超过平台限制的最大数量。添加好文件并自定义填写好标定名称后,单击标定文件后对应的“上传”;每上传一个标定文件,对应一个标定项。

根据提示,添加车辆配置及传感器标定文件,自定义填写标定名称。添加完毕后单击“上传”。

 注意:
请确保上传标定项中文件名不重名,且文件内容正确,长度不可超过64个字符,否则将上传失败。
注意:
请确保上传标定项中文件名不重名,且文件内容正确,长度不可超过64个字符,否则将上传失败。创建标定项
- 单击“完成”,Octopus平台将创建和标定文件一一对应的标定项;
- 单击“完成并创建标定”,将同时创建标定。

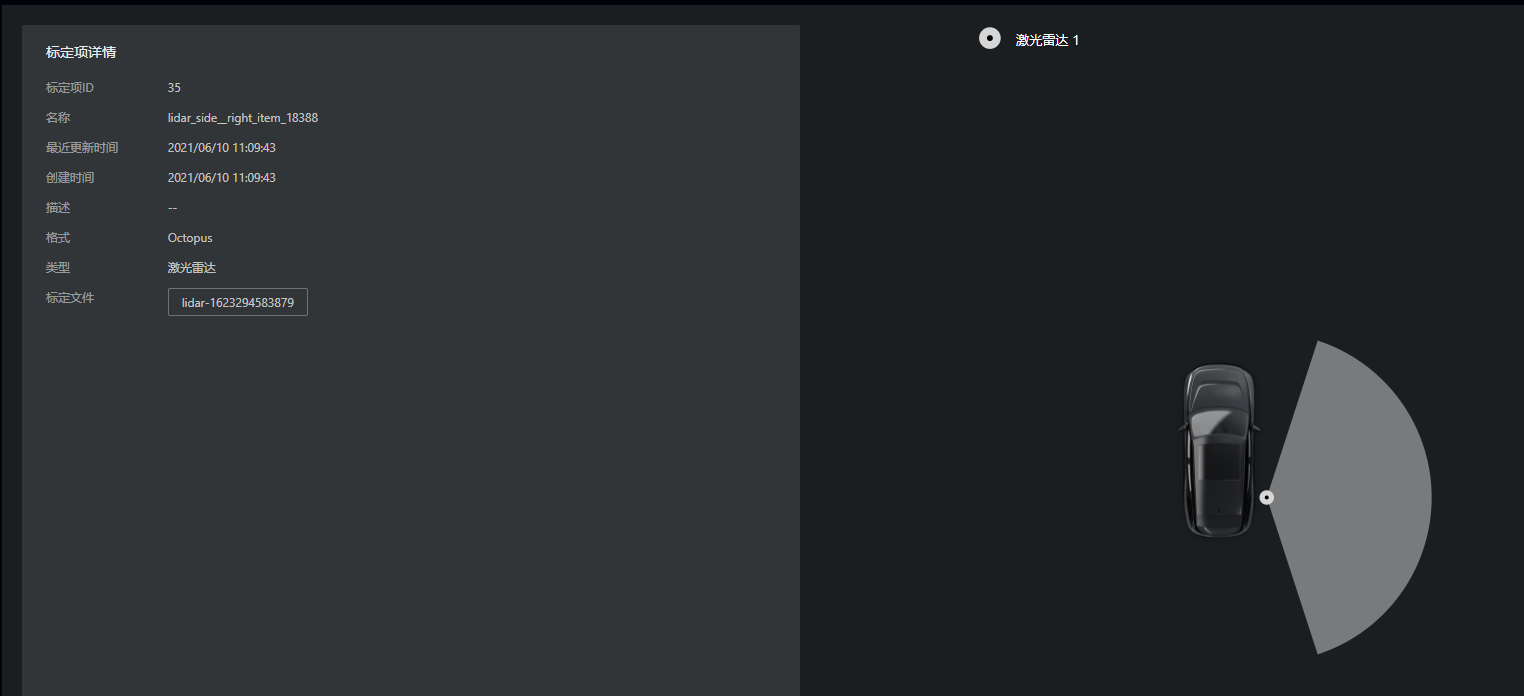
查看标定项信息
单击标定项ID,可查看该标定详情。
# 添加标定
每个标定项对应单个车辆或传感器的配置信息,每个标定则对应某个特定车辆标定项,以及车上所有传感器的标定项,包含车辆本身和车上所有传感器的标定数据信息。
首先需确保标定项都已创建好,然后创建对应的标定文件,将车辆和传感器所有标定项,添加到一个标定中。
在标定列表页面,单击 “添加标定”, 创建标定。
- 从历史标定新建:从已创建的标定中修改标定信息,并应用为新的标定;
- 名称:自定义标定名。可以是中文、英文字母、数字、“-”或“_”,不可包含特殊字符,不能超过64个字符,且不可重名;
- 格式:当前支持Octopus;
- 选取标定项:在各标定类型后单击添加,选取所需标定项。车辆只可选取一个标定项,传感器标定类型可添加多个,但不得超过平台限制的最大标定数量。

查看标定列表
标定信息填写完成后,点击“创建”,则返回标定列表,可以查看新建标定。若没找到新创建的标定,单击页面右上方刷新即可。标定列表同时支持根据名称搜索指定标定。

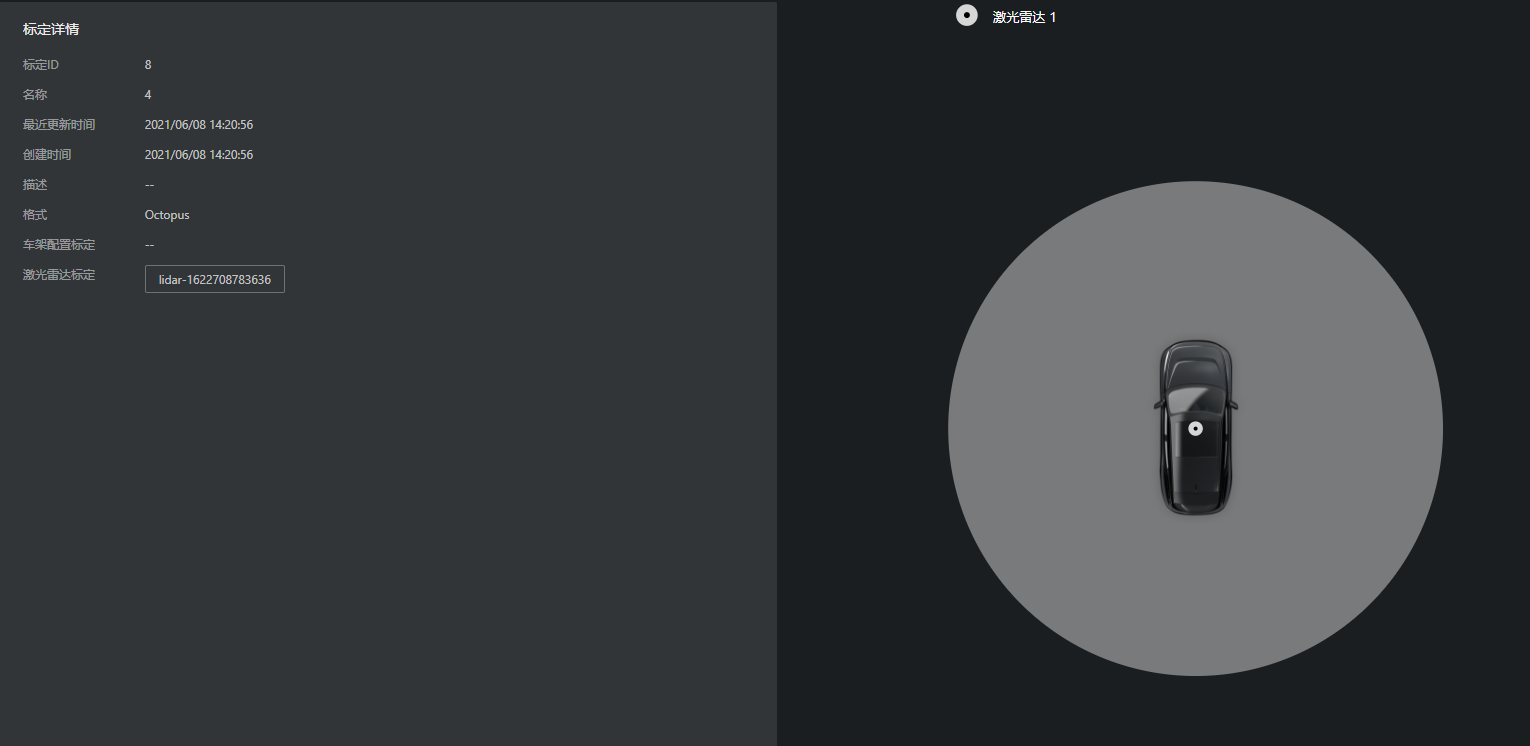
单击标定ID,可查看该标定信息。
# 删除标定
- 单击标定项列表操作栏的“删除”,可删除指定标定项;
- 单击标定列表操作栏的“删除”,可删除指定标定。
- 删除后不可恢复,请谨慎操作;
- 若标定项或标定有被数据收集任务使用,则该标定项和标定不可删除。